안녕하세요.
국내 LoRa Specification을 관련해서 찾아보던 중 SKT 홈페이지에서 LoRa 관련 사업을 보게 되었습니다.
그 중 하나가 Smart [지킴이] 입니다.
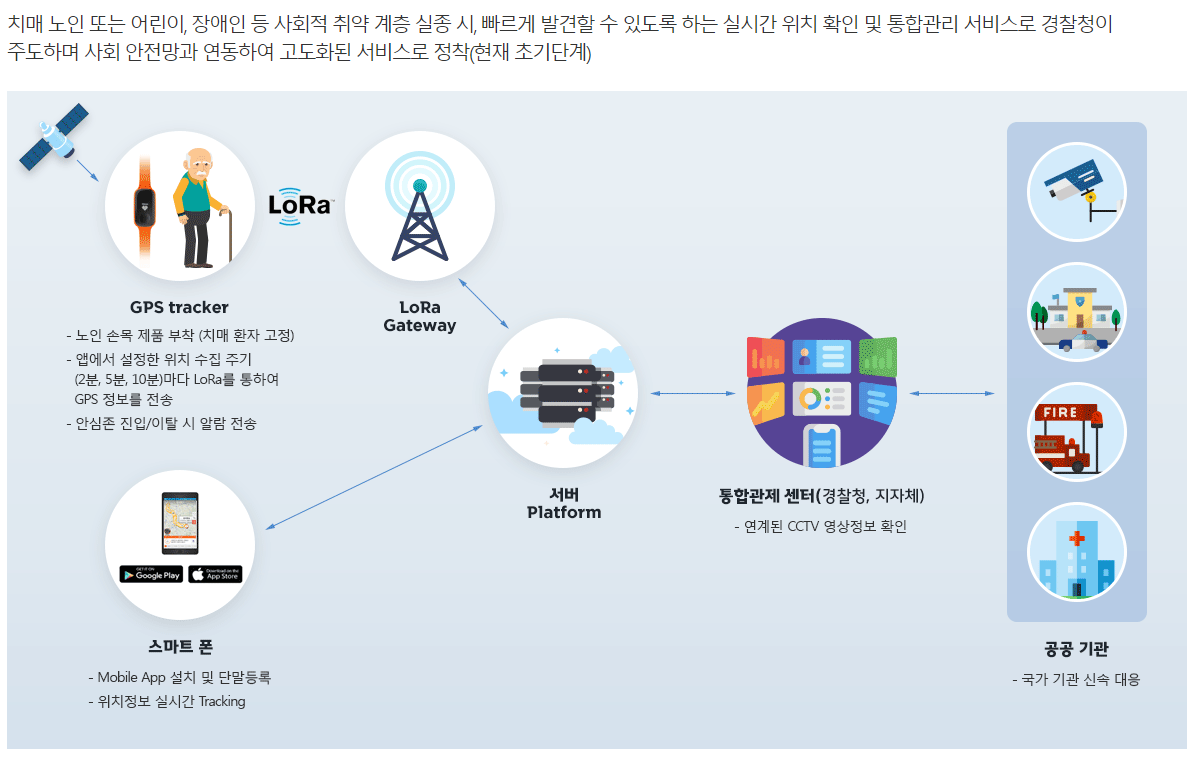
ED에 GPS를 장착해 위치를 GW/NS 로 보내고 AS에서 공공기관으로 Integration 하는 방식인 것 같습니다. ( 일반적인 LoRaWAN이므로, 당연한 이야기입니다. )
저전력, 장거리 통신인 LoRa를 이용한 가장 기본적으로 생각해볼 수 있는 아이디어 인 것 같습니다.
ED : End Device
GW : Gateway
NS : Network Server
AS : Application
이 사업을 보면서 들었던 생각은 과연 SF 결정은 어떻게 하는지 의문이 들었습니다.
SF를 결정하는 Typcial ADR(Chirpstack 방식, TTN 방식)은 Static으로 즉, 움직이지 않는 ED를 대상으로 SF를 결정하므로, 움직이는 ED에는 적합하지 않습니다.
https://coding-yoon.tistory.com/164?category=952690
[LoRa] SF(Spreading Factor)와 DR(Date Rate)와 ADR(Adaptive Data Rate)의 관계
https://coding-yoon.tistory.com/163 [LoRa] CSS(Chirp Spread Spectrum) LoRa와 LoRaWAN의 차이점이 중요하다. LoRa는 저전력 장거리 통신을 위해 IEEE802.15.4a의 CSS(Chirp Spread Spectrum) 기술에서 파생된..
coding-yoon.tistory.com
그래서 지킴이 사업 같은 경우는 GPS가 탑재된 ED를 착용한 사람은 움직이기 때문에 Mobility를 위한 ADR이 필요합니다.
Semtech방식의 Blind ADR을 소개하려고 합니다.
기본적으로 Typical ADR은 SNR Margin을 계산하여 SF를 GW에서 다운링크로 주고 ED에서 다운링크를 받고 SF를 결정하는 방식입니다. 나중에 시간이 된다면, Chirpstack Opensource를 이용해 자세히 봐보겠습니다.
하지만, 채널 조건이 급격하게 변하는 모바일 어플리케이션의 경우엔 Typical ADR은 사용할 수 없어 Semtech은 Blind ADR을 제시합니다.
Blind ADR은 생각보다 간단합니다. 이동체를 예측할 수 없기 때문에, 다운링크를 주는 방식이 아닌 ED에서 일정 주기를 가지고 SF를 규칙적으로 변경하는 것입니다. 그림을 보면 쉽게 이해할 수 있습니다.

한 시간에 SF12로 한 번, SF10로 두 번, SF7로 세 번 씩, 위와 같이 변경하면서 전송하는 방식입니다.
이 Semtech 방식의 간단한 Blind ADR은 애완 동물 추적 같은 응용 프로그램에서 낮은 전력 소비를 유지할 수 있었다고 합니다.
지킴이 대상인 어르신, 어린이 같은 몸이 약한 사람이 애완 동물보다 빨라 봐야 얼마나 빠르겠습니까. 그래서 Semtech 방식의 Blind ADR을 쓰지 않았을까 조심스럽게 예상해봅니다.
'통신 > LoRa' 카테고리의 다른 글
| [LoRa] Unconfirmed mode VS Confirmed mode (0) | 2021.11.24 |
|---|---|
| [LoRa] LoRaWAN Mac Layer - Class A (0) | 2021.11.21 |
| [LoRa] SF(Spreading Factor)와 DR(Date Rate)와 ADR(Adaptive Data Rate)의 관계 (0) | 2021.08.14 |
| [LoRa] CSS(Chirp Spread Spectrum) (0) | 2021.08.12 |
| [LoRa] Regional Parameters - Common Frequency Plans (0) | 2021.08.11 |